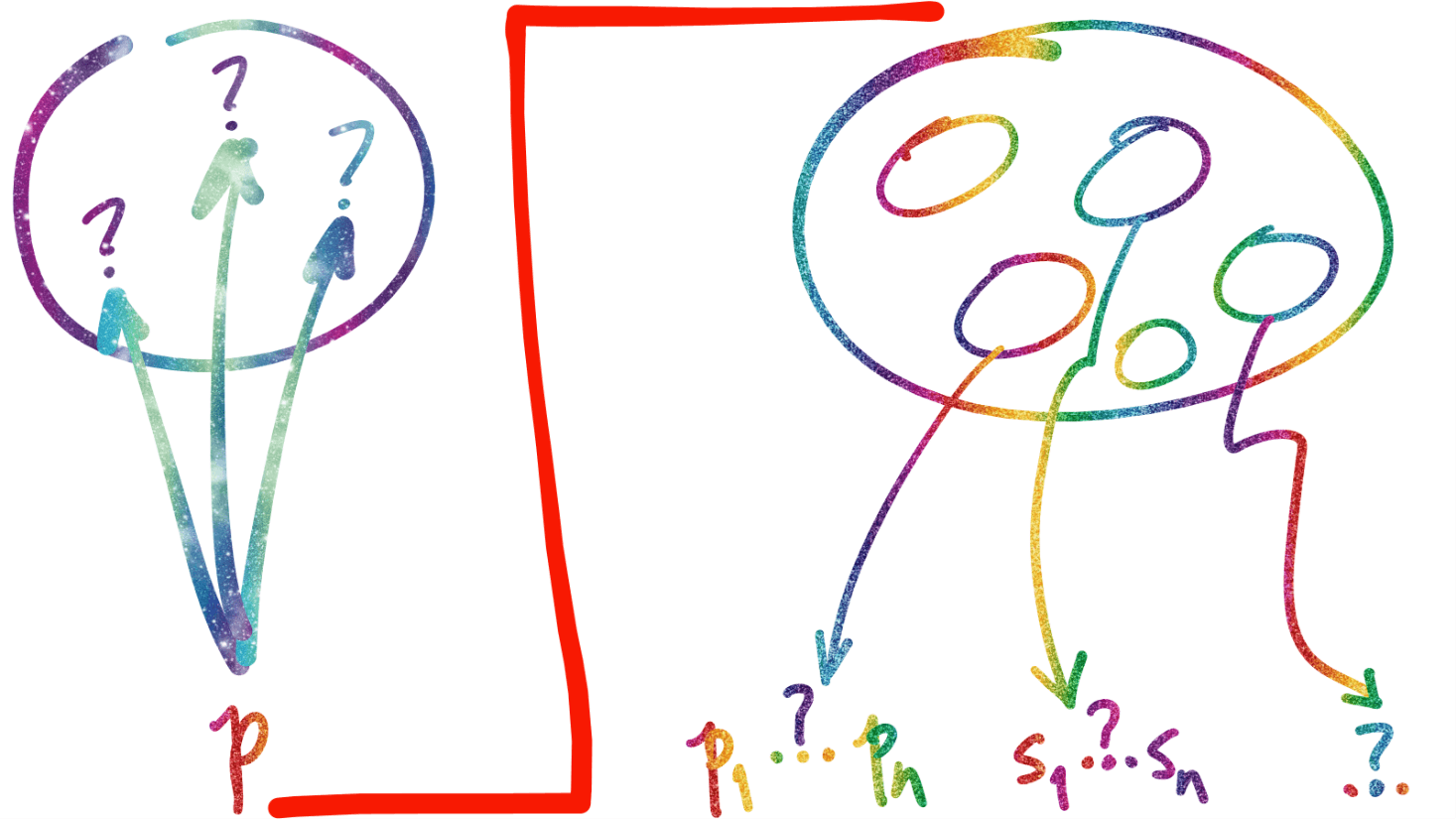
há quem veja a internet das coisas como uma convergência de pelo menos três visões: uma das coisas, pra começar, uma da internet, como não poderia deixar de ser e, o que pode ser surpresa para uns, de semântica, do significado das coisas em rede. semântica entra na equação para unificar as visões de mundo de internet [a realidade vista através das redes] e de coisas [o mundo visto pelos seus objetos]. atzori et al., em The Internet of Things: A survey, abrem o texto mostrando a figura abaixo, que dava, em 2010, uma boa noção do que se queria dizer por internet das coisas.

de um certo ponto de vista, o diagrama diz que smartX são coisas, conectadas, criando significados. talvez você não ache que uma lâmpada de rua, com um sensor [de luminosidade, acima ] e um atuador [uma chave que “liga” a lâmpada quando o sistema de controle decide que “está escuro”] é uma instância de smartX, mas ela é. olhando para o espaço C3 que definimos no primeiro texto da série, a lâmpada que descrevemos está no plano computação + controle. se houvesse comunicação, nossa lâmpada de rua poderia, por exemplo, “dizer” a algum sistema que está “queimada”, ou seja, que todas as suas outras partes estão funcionando mas a fonte de luz, em particular, precisa de manutenção.
se você é filósofo e está lendo esta conversa, pode [com razão] dizer que coisas, aqui, teriam que ser definidas de forma muito mais precisa, até porque o embate teórico sobre o termo é radical e antigo; sem querer entrar na metafísica da coisa, coisas, aqui, são concretas, potencialmente múltiplas e identificáveis. típica visão de engenheiro pra simplificar o tratamento que se dá, em rede, a objetos que de alguma forma já existem fora da rede e que vamos passar a conectar e –pelo menos- assumir que haverá capacidades de computação e controle associadas a eles. dito isto…
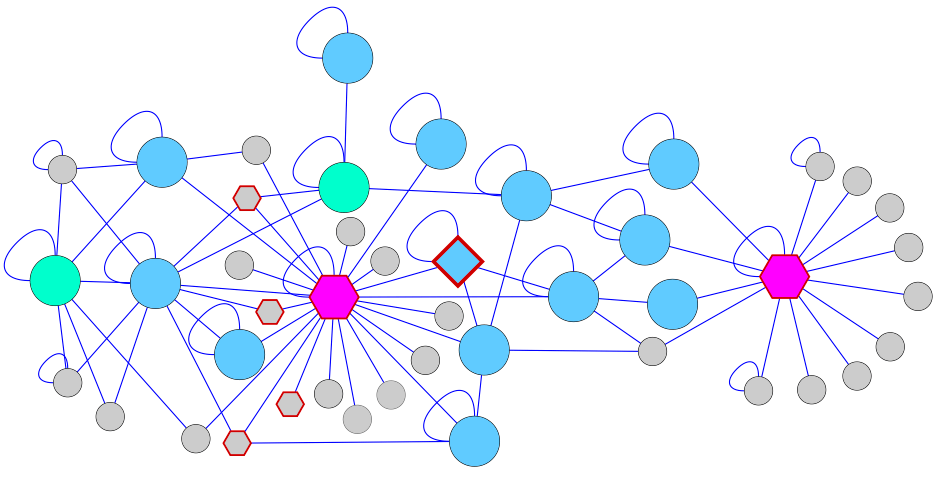
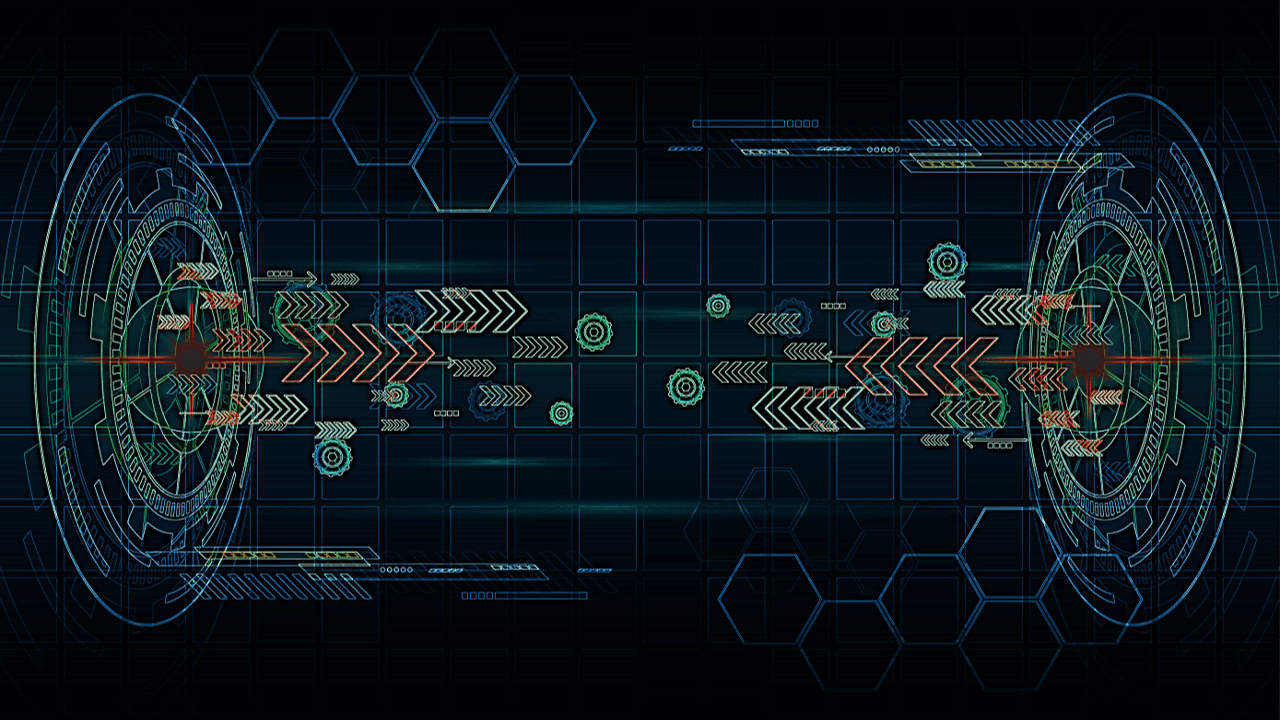
…se você está lendo esta série de textos e achando que as coisas, conectadas, levam um jeito de rede social de objetos, acertou. olhando para a figura abaixo…

…dá pra ver a diferença fundamental entre o desenho por trás do carro autônomo de google, um projeto “de google”, independente de infraestrutura ou responsabilidade de terceiros, especialmente do estado, e projetos europeus equivalentes, que são interdependentes e se “relacionam” com a infraestrutura pública, como ruas e estradas, como mostra o desenho acima, do projeto DRIVE C2X, liderado pela daimler. aqui, os carros não só são coisas em rede; os carros e os outros objetos que fazem parte da infraestrutura de mobilidade têm amplo potencial de relacionamento. funções já testadas, como alerta de aproximação de veículo de emergência, como ambulância, e recomendação de velocidade para surfar uma onda verde de sinais dão uma ideia do que pode vir a ser uma rede social de coisas de muitos tipos, umas privadas, outras públicas, no transito, como exemplo do que poderia ser cidade e as coisas, nela.
e parece com o que fazemos com waze, certo? é claro. mas waze é tocado pelos usuários, é crowdsourced, pertence a um negócio privado [google, de novo] e é bem provável que a infraestrutura da sua e da minha cidade [e estado ou país] nunca façam parte dele. é por isso que o desenho europeu leva o estado em conta; porque eles sabem que o estado, quando funciona bem, faz uma diferença danada.

uma outra diferença –radical- de um DRIVE C2X em relação a um waze é que, quando o grau de automação dos carros aumentar, um sistema público pode controlar, de fato [e de direito…] o que os carros fazem. no cenário mostrado no canto direito superior da imagem acima, o sistema poderia baixar o limite de velocidade no espaço-tempo da chuva, e os motoristas, mesmo o pé no fundo do acelerador, estariam limitados ao que a estrada manda que seja a velocidade naquele período de chuva. note que a dificuldade de tal limitação, hoje e do ponto de vista teórico, é zero: se seu carro tem um motor de muita potência, a velocidade máxima que ele pode atingir já é limitada eletronicamente, segundo o fabricante. na verdade, é limitada por software, e trocar o software de controle resolve o “problema” [de forma irresponsável, em quase todos os casos]. na verdade, o que se quer é algo totalmente diferente de limite de velocidade eletrônico ou por software: o contexto deveria definir qual é a velocidade máxima [ou mínima, em certos casos] em uma via. e o sistema deveria impor tais limites aos veículos que estão passando por dele. nada mais óbvio. se você quiser baixar o pé no autódromo, é problema seu. na BR 101, é problema de todo mundo e você deveria se sujeitar às regras de convivência e de segurança da estrada. nada mais óbvio, também, e que poderá ser realidade em menos de 15, 20 anos.

pensando em redes sociais como contexto, criado por ações de agentes interconectados, o contexto dos sinais de trânsito acima –se o sistema tiver características de comando e controle sobre os carros- não irá permitir que dois carros em vias ortogonais cruzem o sinal ao mesmo tempo. ou que os carros ameacem os pedestres enquanto cruzam a faixa [coisa que você nunca viu por aqui]. mas é claro não é só de restrições que vai viver o carro [ou as coisas] em rede: como os sinais [o sistema] sabe que há, ou não, carros esperando em alguma direção, sinais deixariam de ter tempos fixos e, na maioria dos casos, o resultado seria um tráfego mais fluido no ambiente controlado do que no caos informatizado que temos hoje. falando em fluidez, os sinais de trânsito que estão sendo instalados na transcarioca vão facilitar o tráfego dos ônibus, em relação aos demais veículos. pois é: ao perceber que um BRT se aproxima, os sinais abertos [na via do BRT] vão demorar mais a fechar, e os fechados vão abrir mais cedo…
no cenário do fim do parágrafo anterior, os ônibus vão se comunicar com os sinais, mas não vice-versa. e só ônibus e sinais vão se falar; os carros verão um cruzamento sem tráfego ortogonal e o sinal vermelho pra eles. e não vão entender nada. não os carros, claro, mas seus motoristas. este é o cenário da esquerda, M2M, onde os objetos que estão em rede estão em silos, em verticais de comunicação [M2M = máquina-pra-máquina]. até dá pra fazer muita coisa, mas o potencial é muito menor do que o cenário da direita, da internet das coisas.
no segundo cenário, se a rede não é só entre ônibus e sinais, daria pros sinais [na realidade, para o sistema] dizerem pros carros que eles terão que esperar 15 segundos a mais para o BRT passar… porque, com todos os agentes na mesma rede, as demandas de cada um podem ser equacionadas por todos, em conjunto. pelo menos em tese. só pra lembrar, internet quer dizer entre redes, ou rede que interconecta redes. a internet das coisas, para realizar todo seu potencial, tem que partir justamente deste princípio: todas as coisas na mesma rede, para o bem e para o mal. é disso que a gente vai continuar falando no próximo capítulo.

[se a figura acima atiçar sua curiosidade, clique aqui, depois aqui e finalmente, aqui. os links estão relacionados à proposta de comunicação entre veículos {V2V} dos EUA… e porque, lá, tudo leva a crer que o .gov não vai ter, mesmo, condições de rodar o sistema. o que é incrível, considerando que o custo, para todo o país, seria de US$60M/ano, em valores atuais. a metade do custo direto de operar um porta aviões, que custa a bagatela de US$12.9B e 40-50 milhões de homens-hora de trabalho para construir. algo me diz que há gente investindo seus dólares na iniciativa errada…].